
The freest of free-falls
- By Ira Thorpe
- June 8, 2016
- Comments Off on The freest of free-falls
It’s hard to get used to the change of pace. Scientists have been laboring for half a century to detect gravitational waves from astrophysical sources. In 1966, Joseph Weber published the first results from a device he had invented to detect gravitational waves. Weber would later famously claim to have observed signals, a claim that helped launch the field of gravitational wave astronomy despite being eventually refuted by the scientific community. Shortly thereafter, Rai Weiss came up with the idea for a gravitational wave detector based on laser interferometry while teaching a course on General Relativity at MIT. For the past several decades, a large and dedicated group of scientists, engineers, and managers have been working to design, build, and operate such detectors. Only a few years after the conception of ground-based interferometers, Rai and his friend Pete Bender sketched out concepts for a gravitational wave detector in space. Efforts to realize a space-based detector began in earnest in the 1990s and we’re now looking forward to a potential launch in the 2030s. Those of us in the field have become accustomed to taking the long view.
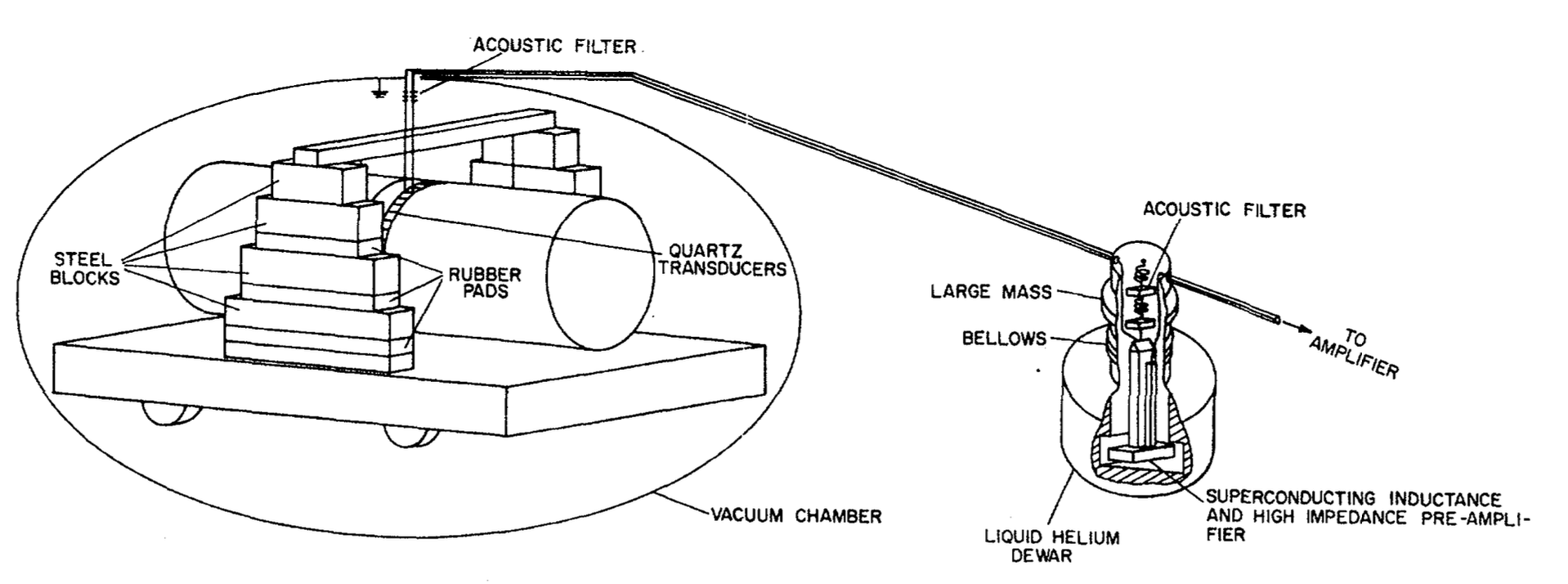
Figure from Joseph Weber’s 1966 paper describing results from his first “gravitational wave bar”. Weber would later claim to have observed astrophysical signals with his detectors, a claim that spurred great interest in the field despite being eventually refuted. From Weber, “Observation of the thermal fluctuations of a gravitational-wave detector” Physical Review Letters, Volume 17 No. 24 (1966). Credit: Physical Review Letters / Joseph Weber
And yet, the past several months have brought more excitement and attention to the gravitational wave community than ever before. Things started in the Fall of 2015, when rumors began swirling about a possible detection by the LIGO project. True to their word, not a one of the thousand-member LIGO collaboration responded to inquiries and yet the rumor refused to die down. Then on December 3rd, 2015, the European Space Agency’s LISA Pathfinder mission launched from Kourou, French Guiana, marking the first step towards realizing Pete and Rai’s space detector concept. In Februrary, as Pathfinder prepared to enter science operations, the LIGO collaboration finally broke their silence – the two upgraded detectors had observed a signal that unambiguously originated from the collision and merger of a pair of black holes with masses of 36 and 29 times that of our Sun. Suddenly, gravitational waves were the subject of Presidential tweets, late-night comedic monologues, and countless newspaper articles. Gravitational wave astronomy is no longer a someday thing, it is a now thing.

The winter of 2015/2016 was a momentous time for gravitational wave science. The first direct detection of a gravitational wave was announced by the LIGO collaboration [left] and the LISA Pathfinder mission was launched and began science operations [right].Credit: (left Caltech/MIT/LIGO Lab (see https://www.ligo.caltech.edu/image/ligo20160211a for details) (right) European Space Agency / CNES
While the LISA Pathfinder team was energized by the LIGO success, we had much work to do of our own. After the nerve-wracking, but ultimately successful, release of Pathfinder’s two Gold-Platinum test masses into free flight, the science team was handed the proverbial “keys” to the spacecraft and began our experiments.
Prior to the mission, we had been cautiously optimistic that we would meet the mission requirements, essentially a promise made by the instrument designers to the funding agency to reach a specified level of in-flight performance. Our performance models, informed by numerous laboratory experiments and incorporating as many physical effects as we could imagine, suggested that the required performance would be met with some margin. Of course, a model is only as good as its architects – an important effect could have been left out. Plus there was the added pressure that the model itself is one of the chief goals of the mission. Pathfinder is intended to demonstrate that the scientific community, together with our engineering and management colleagues in the aerospace industry, knows how to build an instrument like this with the ultimate goal being extrapolating the performance to a full-scale space-based gravitational wave detector such as the one envisioned by Pete and Rai in the 1970s.
The experiment plan of LISA Pathfinder has two basic types of activities. In the first type, we leave the instrument alone and try and assess its performance. Recall that what we’re measuring is the degree to which our test masses deviate from perfect free fall. We quantify these deviations using units of acceleration, much like the strength of Earth’s surface gravity is typically reported in acceleration: 1 g = 9.8 meters per second squared. The only difference is that LPF is interested in accelerations on the order of 1/100000000000000 meters per second squared or the “fempto-g” level.
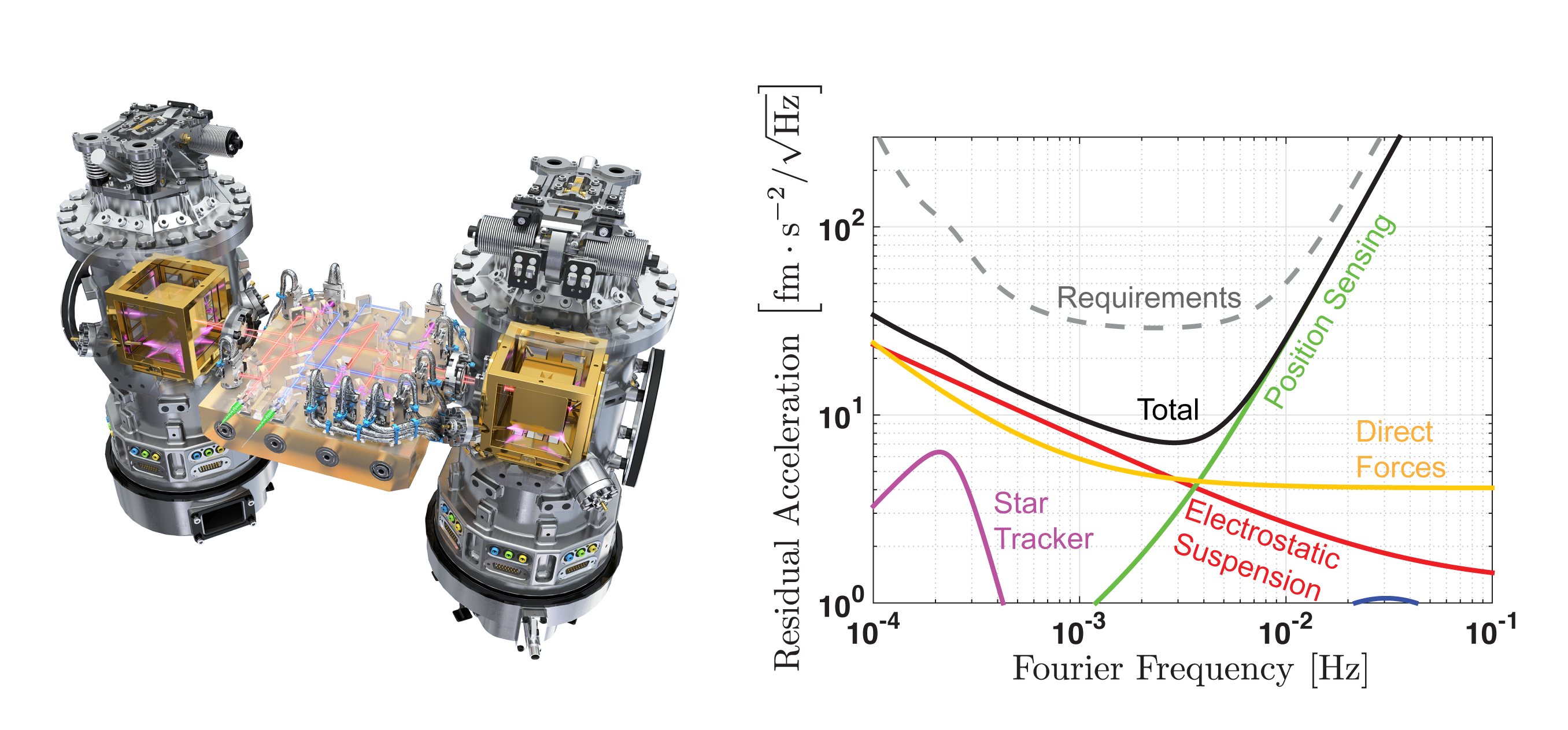
LISA Pathfinder’s science operations consist of two types of activities. Noise measurement campaigns during which the instrument’s performance is assessed and targeted investigations in which one particular effect is isolated and measured. The goal is to refine a physics-based model [right] that can be used to both optimize the performance of LISA Pathfinder as well as predict the performance of future instrument designs. Credit: (left) European Space Agency (right) Ira Thorpe
From the very first noise measurement, we knew we had a great instrument. The level measured met the requirements handily and the performance at high frequencies, governed by the performance of the laser interferometer itself, was off the charts. While we were thrilled, there was still work to do. To be successful we needed to understand every bump and wiggle in the measured spectrum so that we could be confident in extrapolating to LISA.
This brings us to the second class of measurement in LISA Pathfinder. Through various mechanisms, we can inject deliberate disturbances into different parts of the instrument. Temperature fluctuations, magnetic fields, numerous electrical signals, etc. We can also adjust configurations such as the position and orientation of the test masses, the level of the microNewton thrusters, etc. Through a systematic campaign of such experiments, we gradually began to understand and optimize the performance of the instrument. All the while, we interleaved noise measurement campaigns to assess our progress.
The result of the first round of this effort was published in Physical Review Letters on June 7th. The Figure below shows the main result. The imperfection of the test masses free fall is displayed using acceleration amplitude (actually acceleration amplitude spectral density for the practitioners) on the vertical axis and the frequency of the fluctuations on the horizontal axis. Since we’re trying to measure noise, lower is better. The orange curve shows the LISA Pathfinder requirements, anything below this means a successful mission. The dark blue curve in the background represents the measured performance after the first round of optimization. This curve very nearly matches the simple noise model shown in white. However, there are two areas of excess noise: low frequencies below 5 milliHertz and mid-frequencies between 20 and 200 mHz. Some careful analysis determined that the low-frequency excess is caused by the rotation of the spacecraft and the resulting centrifugal acceleration. By measuring this rotation and using it to compute and subtract the centrifugal term, we can largely eliminate the excess. The mid-frequency excess is mostly associated with test-mass jitter and can also be removed by subtracting measured couplings to various auxiliary channels. The result is the bright purple curve in the foreground, which very closely matches the simple noise model. Most exciting is the fact that the measured performance is very near that set out for the LISA mission, only roughly 25% above the LISA requirements. More is explained in this video.
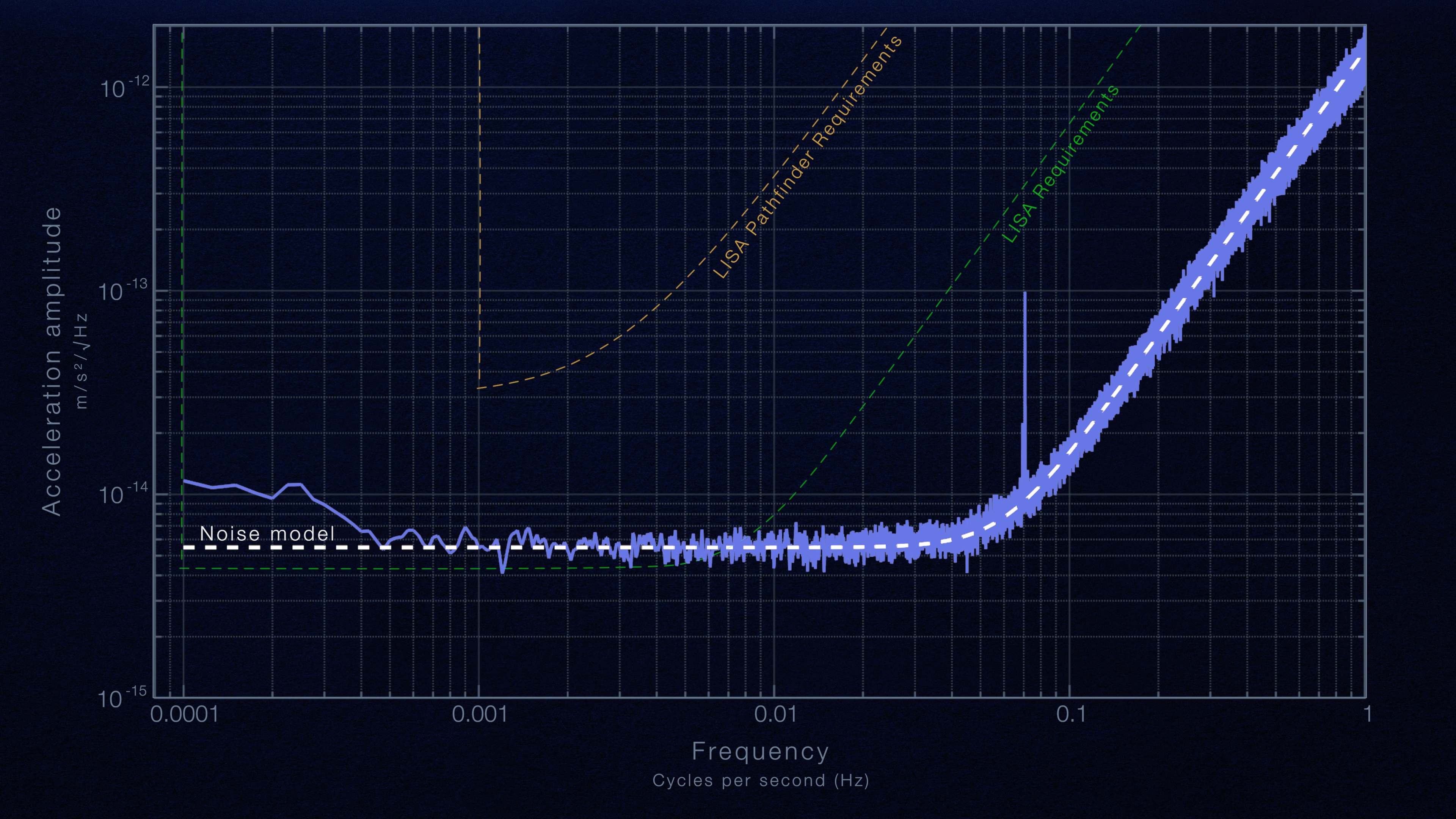
Adaptation of Figure 1 from “Sub-femto-g free-fall for space-based gravitational wave observatories: LISA Pathfinder results” showing the preliminary results of the first two months of LISA Pathfinder operations. Most notable is that the measured performance of the instrument far exceeds the requirements set for LISA Pathfinder and approaches the requirements envisioned for a future full-scale observatory such as LISA. Credit: NASA
Since preparing the publication, the LISA Pathfinder team has continued to dig into the performance of the instrument. We have strong evidence that the lower limit of the performance is due to tiny amounts of leftover gas that surround the test masses. As the gas gradually evaporates to space, we can track the performance gradually improving. This is exactly the kind of information the designers of LISA will need – a verified model of how gas pressure effects performance.
Up next for LISA Pathfinder is the activation of the NASA-provided payload, called the Disturbance Reduction System (DRS). The DRS includes a novel type of micro thruster called a Colloidal MicroNewton Thruster which propels the spacecraft by accelerating microscopic droplets of charged liquid with an electric field – basically the same operating principle as an ink-jet printer. The DRS will use the same set of European-provided test masses and interferometer that have been used to date. DRS operations will continue into October, after which control will be handed back over to Europe for a possible extended mission phase.
LIGO detections, LISA Pathfinder operations, I guess we need to get used to life in the fast lane!
